











回転形サーボモータSGMXJモデル
仕様
中慣性 高速- 定格出力 50W~750W
- 最高回転速度 7000min-1
- 26ビットエンコーダ
| 電圧 | AC 200 V | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| 形式 SGMXJ- | A5A | 01A | C2A | 02A | 04A | 06A | 08A | ||
| 定格出力∗1 | W | 50 | 100 | 150 | 200 | 400 | 600 | 750 | |
| 定格トルク∗1,∗2 | N·m | 0.159 | 0.318 | 0.477 | 0.637 | 1.27 | 1.91 | 2.39 | |
| 瞬時最大トルク∗1 | N·m | 50 | 100 | 150 | 200 | 400 | 600 | 750 | |
| 定格電流∗1 | Arms | 0.159 | 0.318 | 0.477 | 0.637 | 1.27 | 1.91 | 2.39 | |
| 瞬時最大電流∗1 | Arms | 50 | 100 | 150 | 200 | 400 | 600 | 750 | |
| 定格回転速度∗1 | min-1 | 3000 | |||||||
| 連続許容回転速度 | min-1 | 7000 | 6000 | ||||||
| 最高回転速度∗1 | min-1 | 7000 | |||||||
| トルク定数 | N·m /Arms |
50 | 100 | 150 | 200 | 400 | 600 | 750 | |
| 回転子 慣性モーメント |
保持ブレーキなし | × 10-4 kg∙m2 | 0.0421 | 0.0669 | 0.0946 | 0.263 | 0.486 | 0.800 | 1.59 |
| 保持ブレーキ付き | 50 | 100 | 150 | 200 | 400 | 600 | 750 | ||
| 保持ブレーキなし+バッテリレス絶対値エンコーダ搭載 | 50 | 100 | 150 | 200 | 400 | 600 | 750 | ||
| 保持ブレーキ付き+バッテリレスエンコーダ搭載 | 50 | 100 | 150 | 200 | 400 | 600 | 750 | ||
| 定格 パワーレート∗1 |
保持ブレーキなし | kW/s | 50 | 100 | 150 | 200 | 400 | 600 | 750 |
| 保持ブレーキ付き | 50 | 100 | 150 | 200 | 400 | 600 | 750 | ||
| 定格角加速度∗1 | 保持ブレーキなし | rad/s2 | 37700 | 47500 | 50400 | 24200 | 26100 | 23800 | 15000 |
| 保持ブレーキ付き | 50 | 100 | 150 | 200 | 400 | 600 | 750 | ||
| オイルシール付きの減定格率 | % | 50 | 50 | 50 | |||||
| ヒートシンクサイズ(アルミ製)∗3 | mm | 50 | 50 | ||||||
| 保護構造∗4 | 全閉自冷IP67 | ||||||||
| 保持 ブレーキ仕様∗5 |
定格電圧 | V | DC24 V±10% | ||||||
| 容量 | W | 5.5 | 6 | 6.5 | |||||
| 保持トルク | N·m | 50 | 100 | 150 | 200 | 400 | 600 | 750 | |
| コイル抵抗 | Ω (at 20°C) | 5.5 | 6 | 6.5 | |||||
| 定格電流 | A (at 20°C) |
0.23 | 0.25 | 0.27 | |||||
| ブレーキ開放時間 | ms | 60 | 80 | ||||||
| ブレーキ動作時間 | ms | 100 | |||||||
| 許容負荷慣性モーメント(回転子慣性モーメントの倍率)∗6 | 6000 min-1時 | 35倍 | 35倍 | 35倍 | 15倍 | 10倍 | 20倍 | 12倍 | |
| 7000 min-1時 | 10倍 | 5倍 | 15倍 | 8倍 | |||||
| 回生抵抗外付け、DB抵抗外付け∗7の場合 | 6000 min-1時 |
35倍 | 35倍 | 35倍 | 25倍 | 25倍 | 20倍 | 15倍 | |
| 7000 min-1時 |
|||||||||
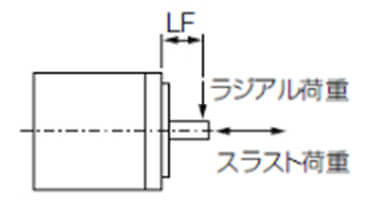
| 軸の許容荷重∗8 | LF | mm | 20 | 25 | 35 | ||||
| 許容ラジアル荷重 | N | 78 | 245 | 392 | |||||
| 許容スラスト荷重 | N | 54 | 74 | 147 | |||||
∗1 サーボパックと組み合わせて運転し、電機子巻線温度が100°C のときの値です。その他の項目は20°C のときの値です。また、各値は代表値です。
∗2 定格トルクは表記寸法のアルミ製または鉄製ヒートシンクに取り付けた場合の使用周囲温度40°C での連続許容トルク値を示します。
∗3 ヒートシンクと減定格率の関係は、カタログの「サーボモータの放熱条件」を参照してください。
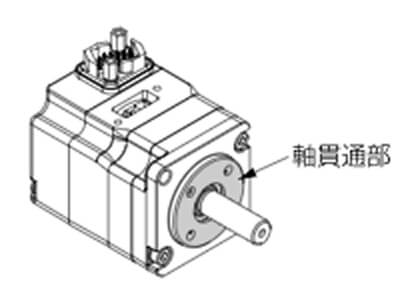
∗4 軸貫通部を除きます。また、専用ケーブルを使用した場合のみ、保護構造仕様を満たします。
∗5 保持ブレーキ付きサーボモータをご使用の場合は、以下に示す点にご注意ください。
保持ブレーキは制動用には使用できません。
保持ブレーキ開放時間及び保持ブレーキ作動時間は使用する放電回路によって異なります。ご使用の際は、必ず実機で動作遅れ時間を確認してください。
DC24 V 電源はお客様でご準備ください。
∗6 回転子慣性モーメントの倍率は、保持ブレーキなしの標準サーボモータに対する値です。
∗7 DB抵抗を外付けする場合、サーボパックはハードウェアオプション仕様「0020」を選択してください。
ただし、下記のサーボパック(最大適用モータ容量400 W以下)と組み合わせる場合は、DB抵抗を外付けできません。
• SGDXS-R70A□□A0020 ~ -2R8A□□A0020
• SGDXW-1R6A□□A0020 ~ -2R8A□□A0020
∗8 サーボモータの運転中に加わるラジアル荷重、スラスト荷重は、表中の値を超えないように機械の設計を行ってください。
各種サポート情報
サーボの容量選定や導入をサポートします
装置の生産性向上や高精度化、
データ収集などをご検討中の皆さまへ、
サーボの価格や容量選定のほか、
課題解決や導入のご相談、お打ち合わせの
ご依頼を受け付けています。
まずはお気軽にお問い合わせください。-








閲覧頻度の多いよくある質問
- 1 全般 FAQ詳細ページ1_変更変更変更変更変更変更
- 2 全般 FAQ詳細ページ1_変更変更変更変更変更変更
- 3 全般 FAQ詳細ページ1_変更変更変更変更変更変更